

Die Stadt der Zukunft ist smart. In so einer smarten Stadt kommunizieren Dinge miteinander und ermöglichen völlig neue Anwendungen. Ein Meilenstein auf dem Weg dorthin ist die Vernetzung von Fahrzeugen. Verkehrsteilnehmende, die untereinander Informationen teilen, können sich gegenseitig über Unfälle, Gefahrenzonen und Staus informieren, den Zustand der Straßen, die Auslastung von Verkehrsknotenpunkten und das Verkehrsvolumen erfassen. Diese Informationen können genutzt werden, um den Verkehrsfluss zu optimieren und die Stadt für alle sicherer zu machen.
Es gibt viele Herausforderungen im Rahmen der Anwendung von autonomem Fahren in den Themenbereichen Ethik, Gesellschaft, Infrastruktur, Ökonomie, Ökologie, Psychologie, Recht und Sicherheit. Durch das Abbilden und Durchführen von Testszenarien kann man diese Herausforderungen betrachten mit Hinblick auf das autonome Fahren in einer realen Welt.
Um aufzuzeigen, wie Technologien dabei helfen können, die Digitalisierung der Verkehrswelt sicherer und einfacher zu gestalten, beschreiben wir nachfolgend einige Einsatzmöglichkeiten.
Verkehrsregeln im Code
Im ersten Szenario könnten Automobile die Verkehrsregeln kennen und selbstständig auf den Verkehr reagieren. Bei Verkehrsverstößen anderer Verkehrsteilnehmender reagieren Fahrzeuge autonom und können somit Unfälle selbstständig vermeiden und die Situation an nachfolgende Fahrzeuge kommunizieren. Diese reduzieren auf Basis der Informationen automatisch die Geschwindigkeit oder halten an. Auffahrunfälle (z.B. an Stauenden) würden der Vergangenheit angehören.
Ein weiteres Szenario könnte das unaufmerksame Betreten eines Kindes einer Straße sein. Fahrzeuge könnten automatisch anhand der Hinderniserkennung stoppen oder ausweichen – in diesem Fall würde die Hinderniserkennung sogar aktiv Leben retten können.
Betrachtet man nun eine Kette von Ereignissen als drittes Szenario mit diesem Modell, so könnte im Falle eines schweren Verkehrsunfalls das daraufzukommende Fahrzeug automatisch bremsen und diese Information an nachfolgende Fahrzeuge mittels der Connected Car Plattform weitergeben. Gleichzeitig würde ein Notruf vom Fahrzeug abgesetzt werden, woraufhin sich automatisch ein Rettungswagen auf den Weg zum Unfallort begibt. Dabei berechnet eine KI den schnellsten Weg auf Basis der aktuellen Verkehrssituation. Alle Fahrzeuge oder Ampeln auf diesem Weg würden informiert und könnten rechtzeitig notwendige Handlungen, wie z.B. Anhalten und das Bilden einer Rettungsgasse einleiten. Der Rettungswagen träfe schneller am Unfallort ein und verletzten Personen würde schneller geholfen werden.
Race to the Future – Miniatur-Racer im Test
Um den Weg zur digitalen Vernetzung zu unterstützen, wurde eine Connected Car Plattform entwickelt. Sie ist das Nervensystem der Test-Fahrzeugflotte. Komponenten dieser Plattform sind Kubernetes, Confluent – basierend auf Apache Kafka und HiveMQ. Die Beispiel-Flotte besteht aus vier NVIDIA JetRacern, kleinen Grafikkarten auf Rädern, ausgestattet mit einem NVIDIA Jetson Nano Board. Diese sind in der Lage, im Rahmen eines begrenzten Szenarios, autonom zu fahren und Hindernissen auszuweichen. Sie eignen sich daher perfekt, um das skizzierte Szenario zu simulieren und Informationen an die Connected Car Plattform zu übermitteln.
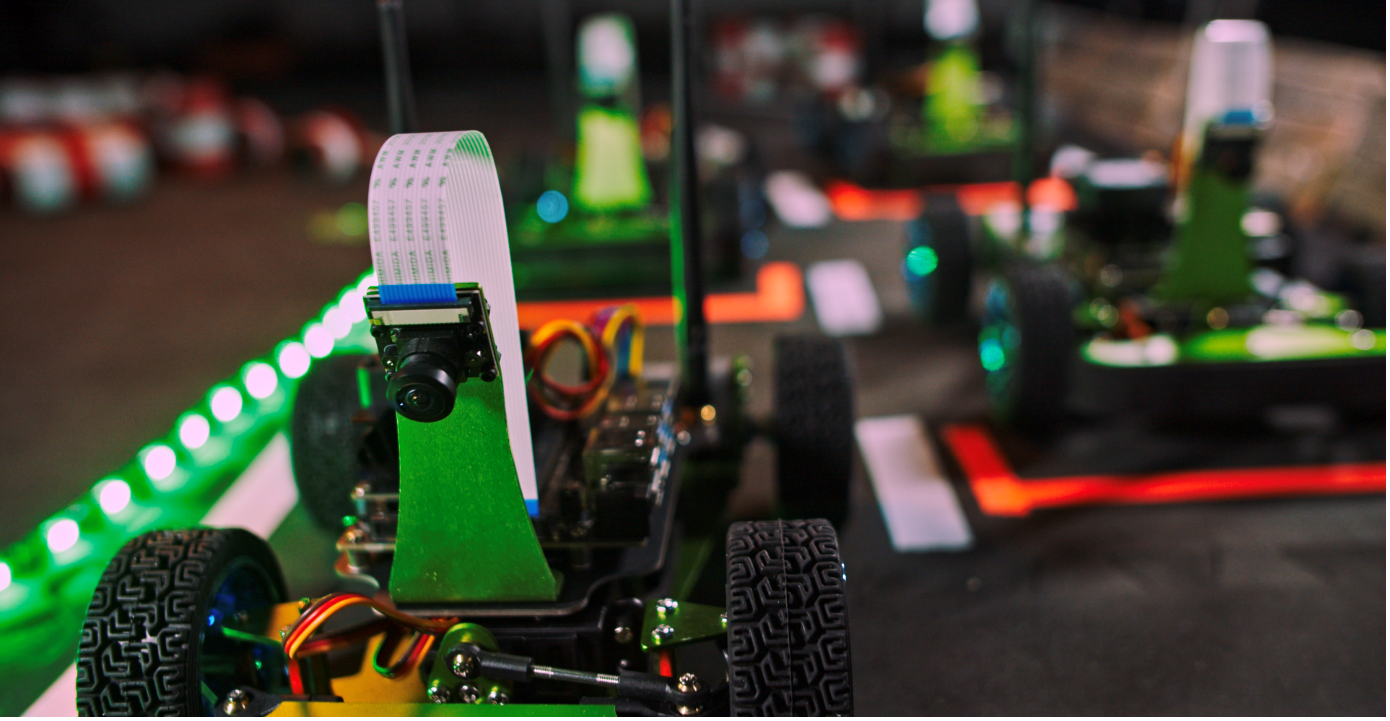
Abb. 1: Jetracer vor dem Start
Die Fahrzeuge verfügen über eine 8 MP HD-Resolution, 160° FOV Wide Angle Kamera. Allein durch Auswertung des Livebilds dieser Kamera können Fahrtweg und Hindernisse erkannt werden. Die Kommunikation zur Plattform erfolgt vom Fahrzeug aus über den HiveMQ MQTT-Broker in nah-Echtzeit (<1s). Die über Kafka gestreamten Daten werden in Splunk sofort visualisiert. So können Inkonsistenzen schnell erkannt und der Zustand der Fahrzeuge überwacht werden.

Abb. 2: Splunk Dashboard der Connected Car Plattform
Zu jedem Zeitpunkt haben die JetRacer Zugang zu Position, Zustand und Gefahreninformationen der anderen Fahrzeuge. Hierfür wurde eine Anwendung entwickelt, die eine bidirektionale Kommunikation zwischen Plattform und Autos ermöglicht. Die JetRacer fahren auf einer im Labor aufgebauten Teststrecke. Diese besteht aus aufgeklebten Fahrbahnmarkierungen mit zwei Spuren und diversen Kurven. Erscheint ein Hindernis auf der Strecke, erkennt das Fahrzeug dies mit einer speziell von uns dafür trainierten künstlichen Intelligenz und kommuniziert die Gefahrenstelle über die Plattform an die restlichen Fahrzeuge, sodass alle anderen Fahrzeuge an der Gefahrenzone entweder halten müssen oder diese vorab schon umfahren. Die Modelle für selbstständiges Fahren werden mit sorgfältig gesammelten Trainingsdaten auf einer NVIDIA DGX A100 in einer containerisierten Umgebung, unter Verwendung des NVIDIA GPU Cloud (NGC) Software Stacks trainiert und anschließend auf den JetRacern zum Einsatz gebracht. Die Auswertung der Bilder und die Steuerung der Fahrzeuge findet lokal auf den NVIDIA Jetson Nano Boards der Fahrzeuge statt und benötigt keine Netzwerkverbindung.
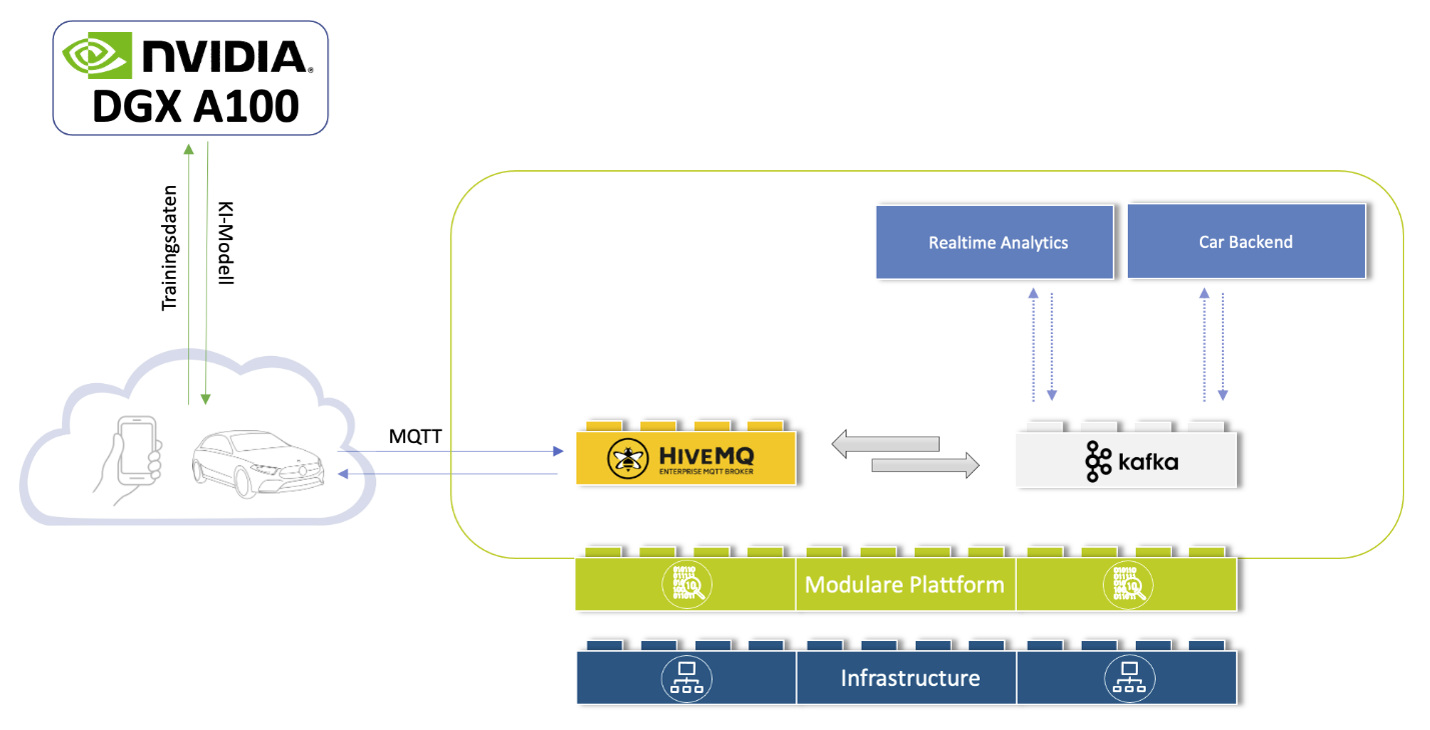
Abb. 3: Architekturskizze der Connected Car Plattform inklusive Rolle der NVIDIA Komponenten
Im Testszenario stellte sich heraus, dass viele Anwendungsbeispiele erfolgreich durchgeführt werden konnten. Die einzelnen Szenarien wurden sowohl Software- als auch hardwareseitig erkannt und vollautonom gelöst. Bis sich dieses Testszenario auch in den allgemeinen Verkehr übertragen lässt, sind noch einige Voraussetzungen zu treffen.
Allerdings konnte das gesamte Team bei dieser Umsetzung einen tollen Erfolg erzielen und begleitet weiterhin aktiv die Entwicklungen in den Bereichen mit.